暗网下载 智能车竞赛有刷电机驱动详解,以drv8701芯片驱动为例
引言
全国大学生智能汽车竞赛中,有刷电机的使用以及驱动,是竞赛人员应当掌握的必备技能,然而不少人对有刷驱动的驱动方式存在诸多误解,而且焊接完成后常常出现问题,却不知从哪里去探测,本文会针对此问题予以解决,还会为大家提供详细解释,期望大家在竞赛中顺利,要是有问题,还望大佬轻点批评/(ㄒoㄒ)/~~。
强调:以6s电池输入为例
原理图:
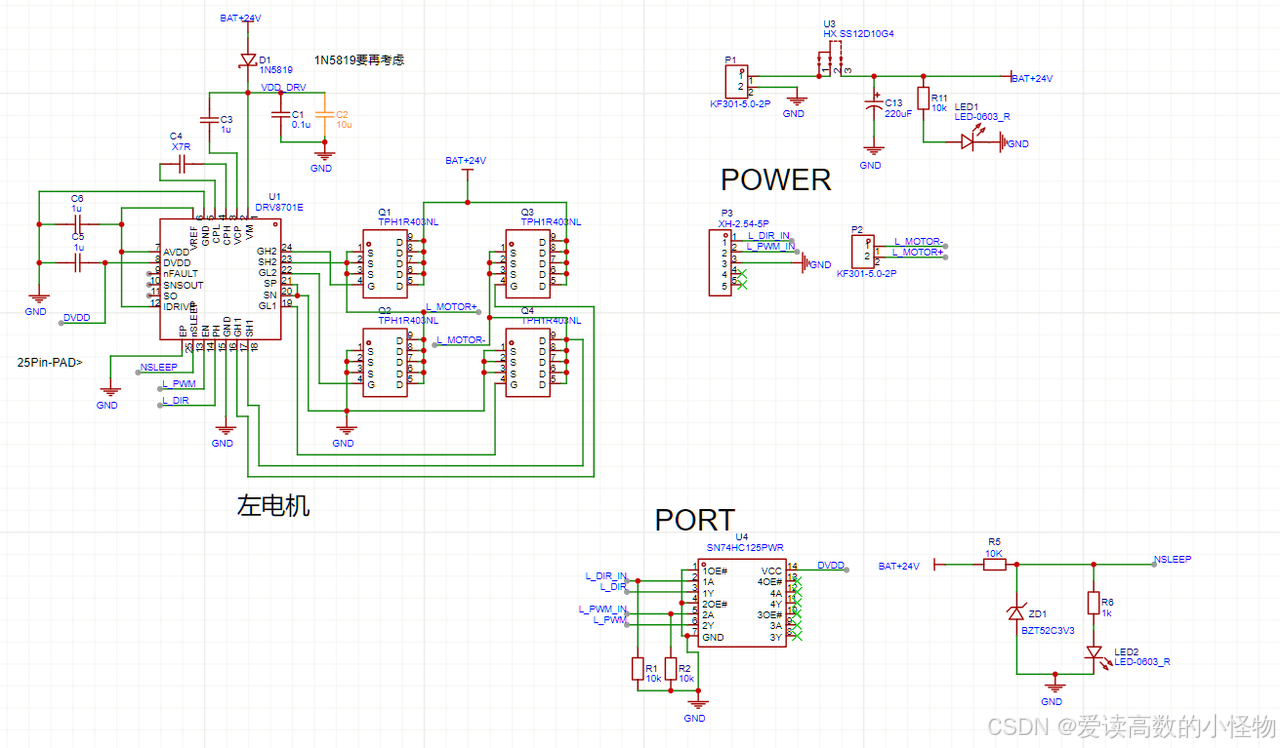
一.电路整体分析1.电源输入
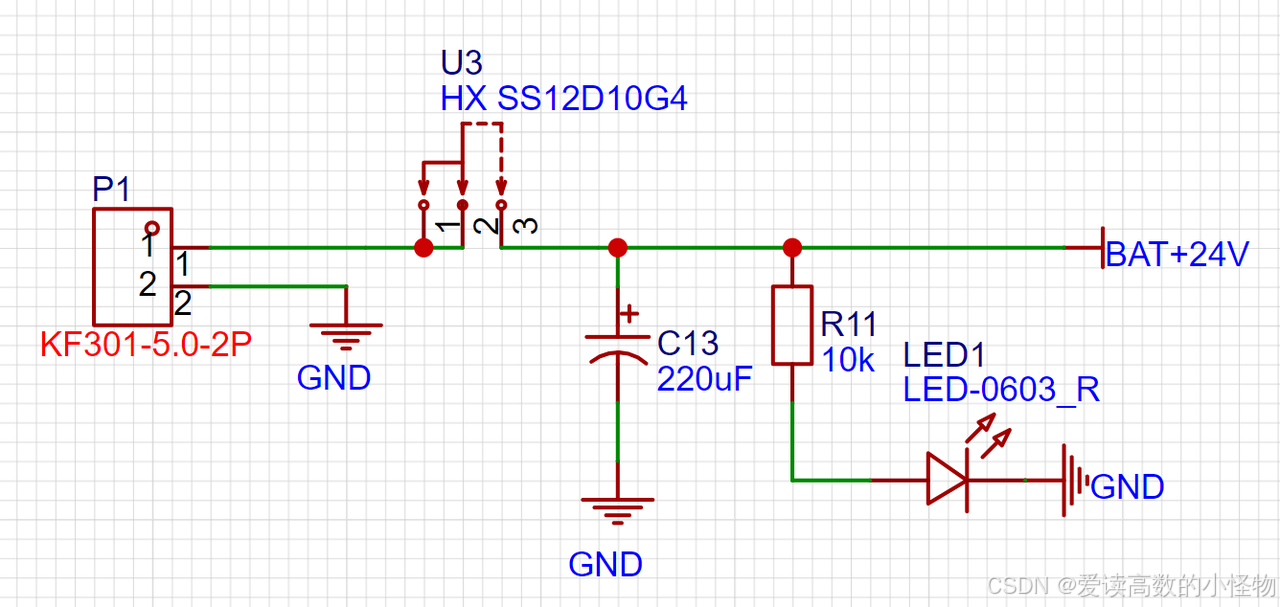
主板的电源分口那里来的电源,图中那个部分便是电源输入电路,该电路借助两个KF -301端子进行连接。
用于电压滤波的中间的C13电容,能使纹波更小,与此同时,可防止在大纹波情况下,一些芯片外设可能出现无法工作的状况,其中最受影响的,应是隔离电路内部集成的四个集成运放。
LED1有着用于指示是否存在电源输入的作用,然而,只要灯的功率比最低亮时的功率还要大,led灯便能够发光,所以,经由led指示仅仅能够确定存在电源,却无法确定电源是不是6s电池电源,至于led灯前面电阻的选取,要尽量予以偏大的选择,以此来防止功率过大,进而烧坏led灯。
事实上,电源输入那存有不少能够开展优化的地方,将pmos添加为电子开关使用,以此发挥出防止反接的功用,然而必须留心Pmos所能接纳的最大电流,又或者再添加上分压电路以及一个3V3稳压二极管去用以做电压采样,进而获取当下电池电压该方面的信息,削减主板采样电路,具体的情形还得要大家自行去探索 。
2.电机控制信号输入
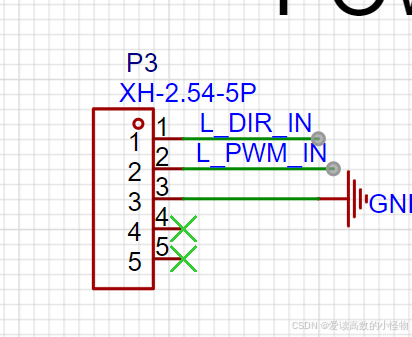
存在着四个主要的信号线,其中一个是pwm信号,另外有DIR方向信号,还有GND信号,以及3.3V使能信号。
pwm信号:与drv8701e的EN口相连接,EN口充当着h桥的使能端,实际上讲,其是对h桥当中的mos管的开关速率予以控制。
DIR信号,它连接着drv8701e的PH口,PH口扮演着H桥相位输入端的角色,借助方向信号的0电平以及1电平,来对H桥里电流的走向加以控制,靠着这样的控制方式,进而实现对电机正转以及反转的控制呢。

GND信号:使主板与驱动板共地。
由3.3V提供的使能信号,要连接到drv8701e的那个nsleep角 ,因为nsleep角在其内部会自然下拉 ,所以默认时会处于低电平状态,随之芯片处在了休眠状态 ,此时需要3.3V连接方能让nsleep角变为高电平 ,以便能驱动芯片开始工作 。
在逐飞开源电路这儿,确实存在3.3V信号线,随后很多车友为其做了更新,纳入了3.3V使能电路,削减了一个3.3V信号线的输入项,致使主板跟驱动板的连接变得更少,避免驱动板于驱动电机期间引发3.3V电压波动,干扰主板陀螺仪、编码器等精密外设的正常运行啊。
3.隔离电路
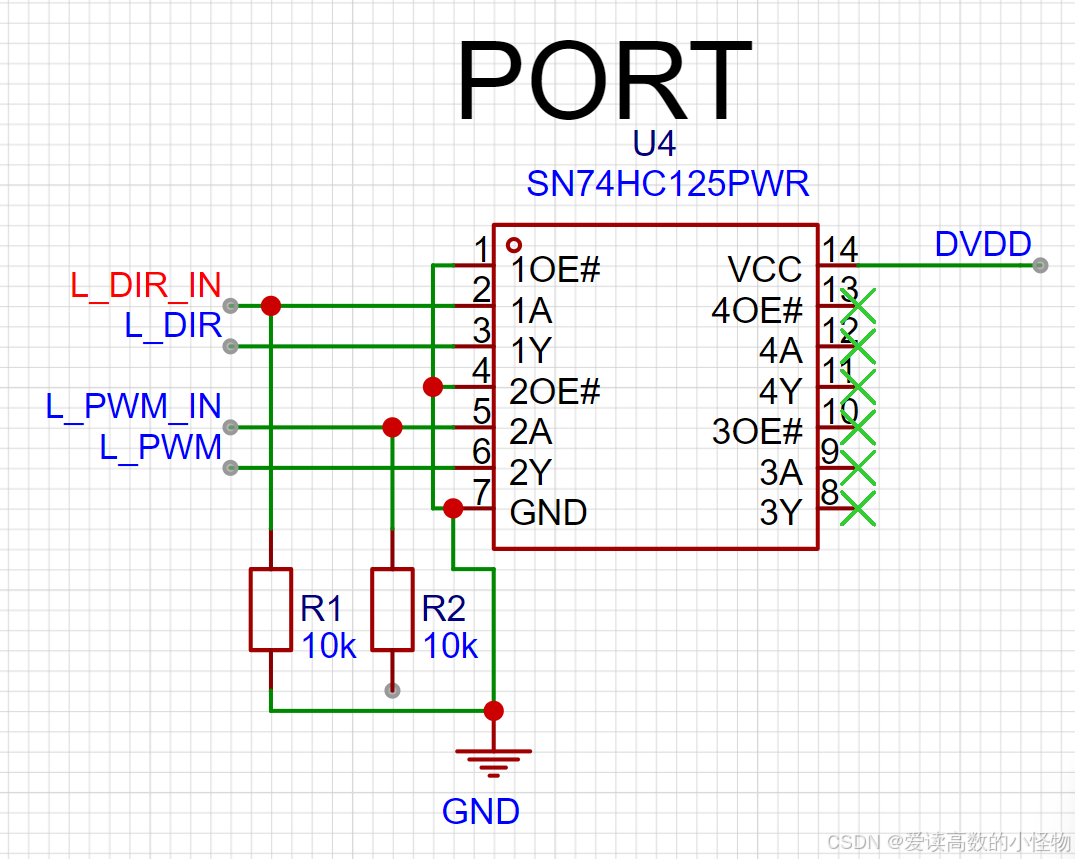
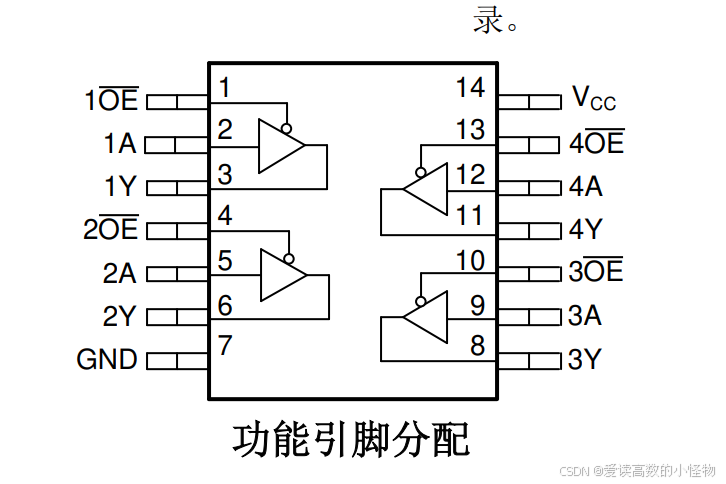
内部集成为四个运放,如上图所示。
首先,其中1OE横杠有着低电平有效之意,此详情可见数字电子技术,再者,要把两个有用信号分别连接至一个运放,凭借运放具备的高输入阻抗以及低输出阻抗特性,以此作为起到电气隔离作用的缓冲级电路。然而,常见的缓冲级电路包含电压跟随器等这类,不过在此处并没有进行阻抗变换以便来保证信号向接下来的一级电路传递,进而保证信号完整性,更多的乃是去进行电气隔离,原因在于,在h桥这一输出端那里,电压是直接跟电机相连接的,于此仅有线以及电机自身内部的阻抗,电压最大能够抵达24V,这会致使线的电流能够达到安培级别,这也就是输出口要做铺铜处理的缘故所在。
主要功能为使输入信号,于经过该电路之际,维持电压恒定不变,并且提供低输出阻抗,借此便于驱动后续电路的,是电压跟随器。如此这般去做的目的,通常涵盖:
进行阻抗转换,把高输入阻抗予以转换,使其成为低输出阻抗,以此来防止信号源负载产生影响。
隔离作用:避免前级电路的相互干扰。
通过这种方式,电路可以保护信号的完整性而不改变其幅度。
4.drv8701e驱动H桥
这儿不进行对于 H 桥那种详细解说,后续文段会详尽讲述,重点对于它的各个引脚实施介绍一番,而且把 drv8701e 做出一个整体性概述 。
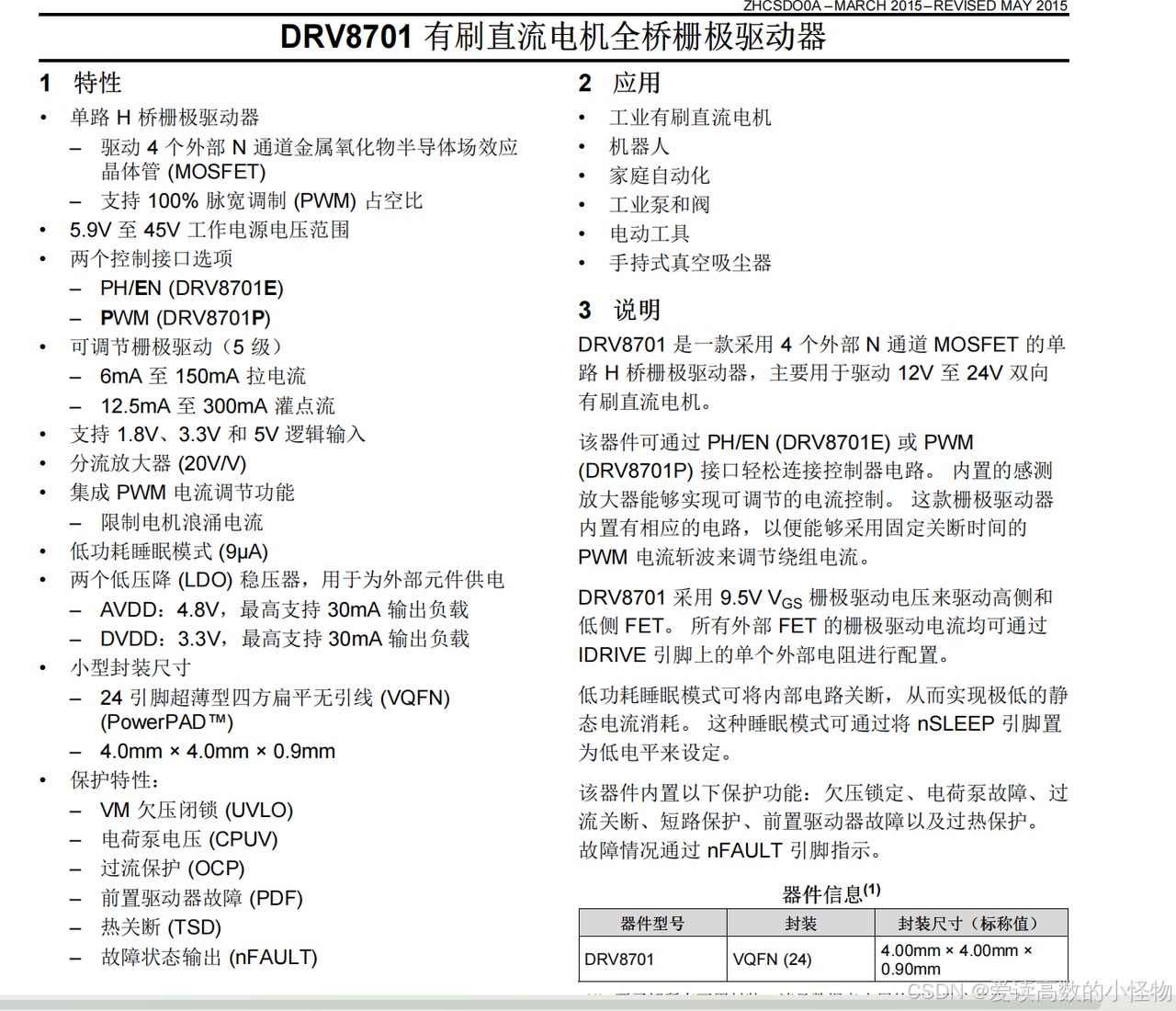
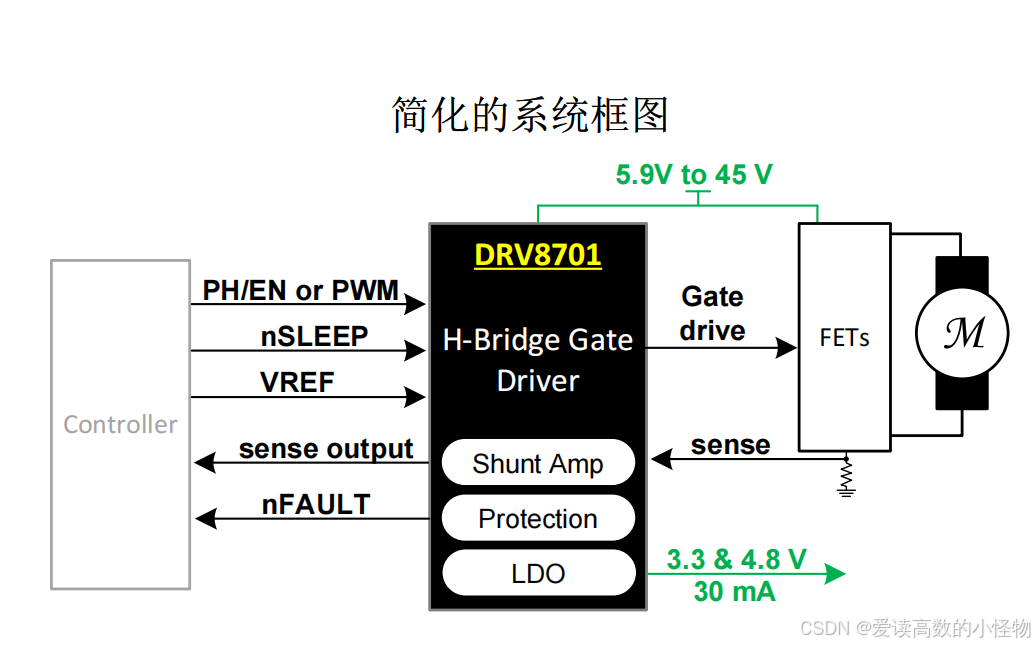
借助上图针对drv8701e所做的总体论述,我们能够瞧见某些功能梗概与功能参数,当中最为言简意赅指出的是,该芯片从整体来讲是一个H桥栅极驱动器,实际上当我们对信号线以及方向线予以变动时,真正产生变动的是输出至栅极的电压,依靠栅极电压的改变来操控H桥的正转、反转以及开关速率 。
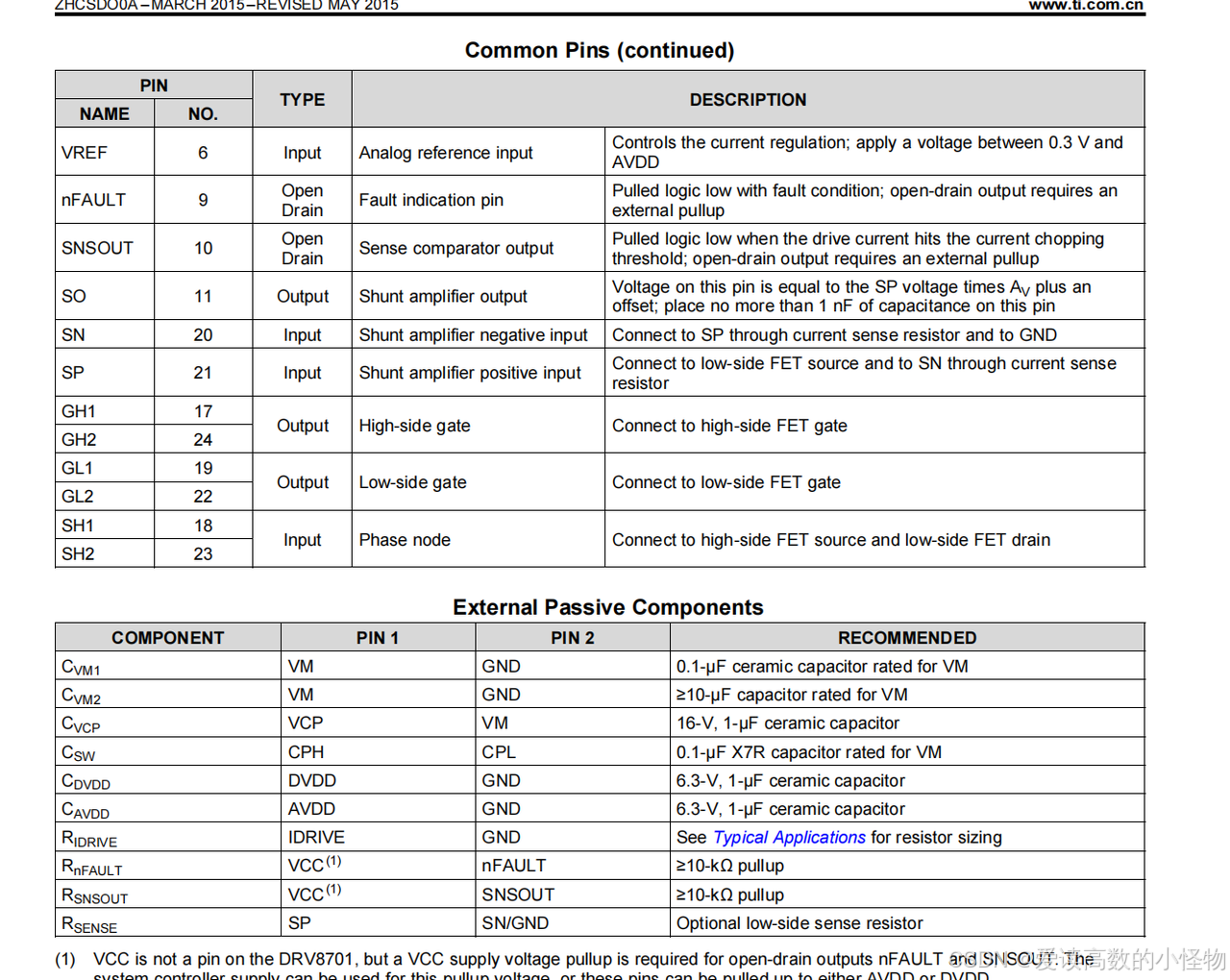
用来展示该芯片功能引脚的图里,作为栅极驱动器的那个东西,其中最为重要的引脚是连接栅极的引脚,也就是GH1、GH2、GL1、GL2这四个引脚,作为该芯片为数不多的输出脚,实际上是将控制电机变化寄托于对这四个引脚的控制之上。
5.芯片使能电路
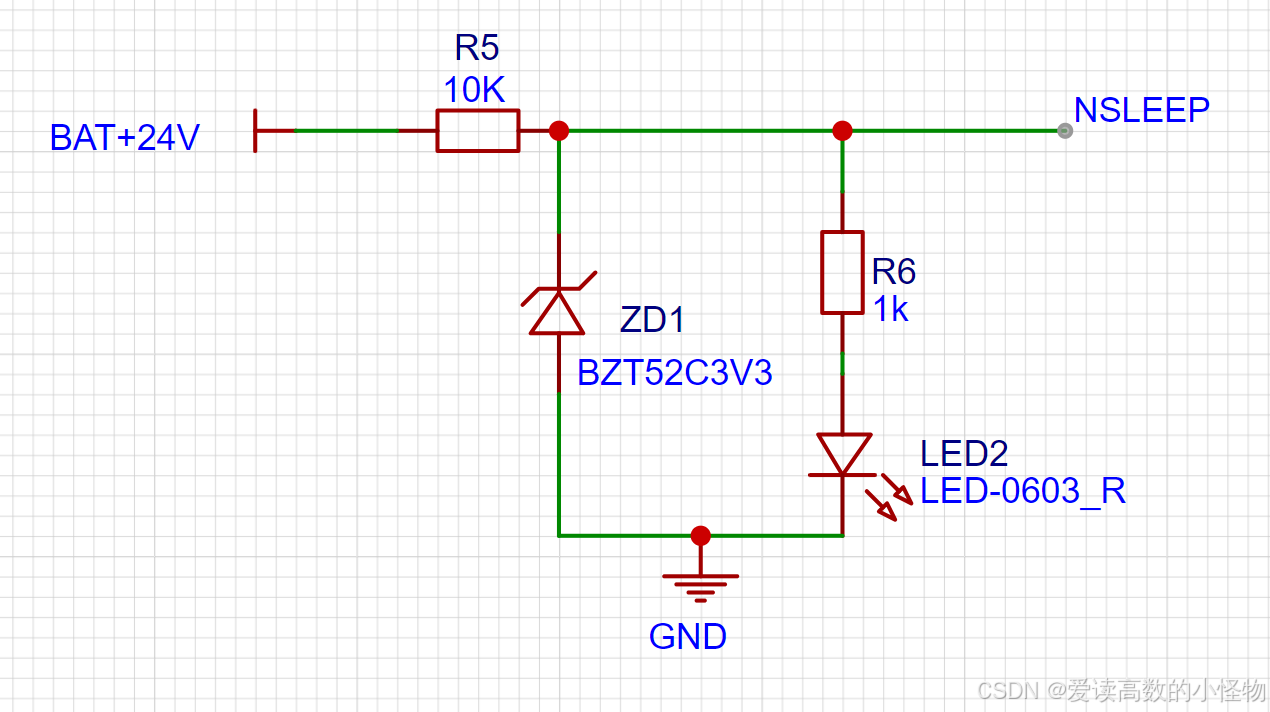
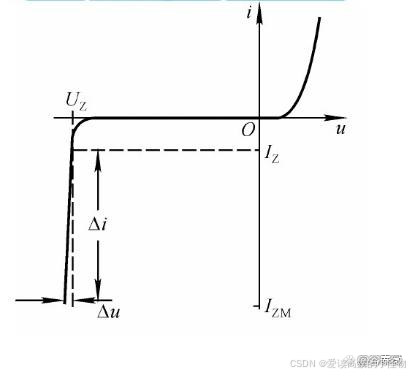
图中有稳压二极管的稳压特性,芯片使能电路所利用的正是该稳压特性,电源电压能够径直透过稳压二极管,可直接降低到 3.3V 来给芯片的 nsleep 角实施芯片使能,然而要留意电阻的选取需依照稳压二极管的函数特性去进行一个大致大概的选取哦,大点是没关系的,而且还能够重新去焊接修改呢,要是电阻太小的话就会出现二极管击穿的现象,led2 用于指示有电源输入,不过那并不一定就是 3.3V,不过在电阻选取正确的情形下一般是没有问题的,唯一的缺点在于,由于电流比较大,会有大部分功率耗散在电阻 R6 上,比较消耗电池电量。
二.H桥驱动详解
1.直流有刷电机基本概念
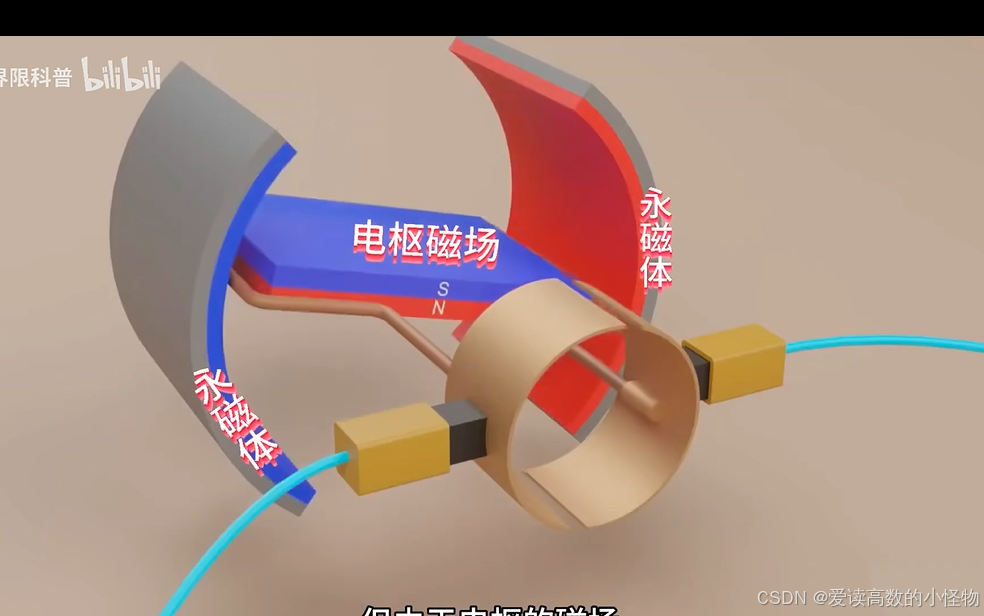
那种被称作直流有刷电机的东西,从其名字就能明白,一方面它是有刷的,而里面存在碳刷;其中图里黄框内部的部分,恰好就是碳刷,这是其一。其二它是直流的,意思是当在所提及对于这个电机而言的固定两端,通入方向为正的直流电的时候,电流会经由碳刷子,从而流入到电枢之处,这样一来就产生电枢磁场,电枢磁场与电机内部生来就有的永磁体所产生的磁场,二者相互之间形成作用,进而使得该电机开始旋转。从实际应用的角度来讲,当通入的电压为正的时候,电机就正向转动,如果是负电压,电机就会反向转动,并且在通常情况下,电压数值越大,转动得就越快,不过呢,因为其本身电枢磁场相互作用所产生的影响,有刷电机能够达到的最低旋转角度,就是半圈 。
因对直流有刷电机存有理解,输入直流电压致使电机旋转,这给我带来一种输出口出直流电压的错觉,某次我拿示波器去测试输出电压的端口,若为直流电压,示波器上应是一条直线,然而上面却是一个方波,我开启示波器的FFT功能,对输出信号进行频率分量观察,发觉除直流分量外还有丰富的频率分量,后来我找出了原因,可见下文。
2.H桥基本概念
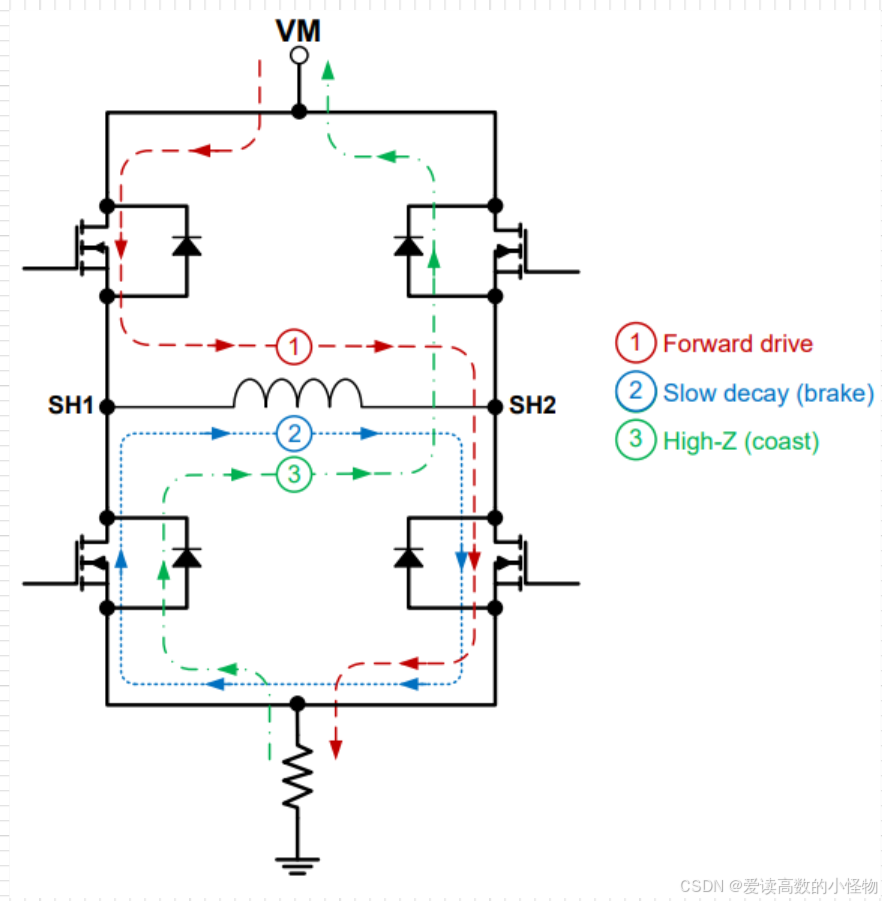
H桥主要由四个mos管构成中间有1个电机连接。
它于方向方面存有三种状态,分别是正转、反转以及刹车,在1号mos与4号mos导通之际,电流从1号mos连接至4号mos,此时电机正转,同样的2号 mos同时也是1号mos和2号mos导通时用于刹车,而在2号 mos导通且3号mos导通之时,电机反转。
那它怎样去控制电机旋转的速率呀?对的,正是借助mos管的开关速率,其和单片机中定时器里ARR与CCR的情况相类似,进而产生出一个类似pwm的信号,通过改变输出电压的有效值来控制电机速率,简单讲,mos栅极信号占空比越大,输出给电机的有效值电压就越大。这也就说明了为何输出电压是一个方波信号而非直流信号。
3.芯片对于H桥的控制
鉴于上文针对有刷电机所作的叙述,联同上图针对H桥所作的叙述,实际上芯片控制电机旋转的方式已然相当明晰了。
从drv8701e芯片手册能够查看详细的内部驱动方式,本文仅仅只是从原理层面进行分析,并不会去探讨具体的驱动方式。
主板向芯片输送PWM信号,同时输送DIR方向信号,芯片借助内部运算,把DIR的正负电平转变为mos管的通断状态,进而实现对电机正反转的控制,又将pwm信号的占空比转化为mos管的通断速率,并以一个pwm信号的形式操控电机的旋转速率。
三.驱动焊接检测流程
需要用到的工具,还有技能,有电表的蜂鸣档,有电表的二极管档,有电表的电压档,有示波器的measure功能,还有示波器的FFT功能。
1.电源输入检测
当亮起 led1 的时候啊表明其实已然存在着输入电压,一般而言呢其实并不会出现什么问题,要是灯一直不亮的情况,要么是 led 灯坏掉啦损坏了,要不是输入电压没接入进来呢 。
2.信号输入检测
我们检查板子的第一步是对输入信号进行检测,要是板子的输入信号不正确,那就无法产生正确的驱动电压,有三个信号线,dir信号线能够借助电表的电压档来判定高低电平状态,而对于pwm信号,要把GND引脚引出,把示波器的接地线连接到板子的GND引脚之处,将信号线连接pwm信号,接着点击measure键,这样就能确定pwm信号以及dir信号的正确性了。
3.隔离电路检测
接下来的第二步所要做的事情是开展隔离电路检测,这与上述提及的信号线检测情况道理是一样的,要是运放的输入端处所呈现的结果跟输出端处所呈现的结果相同,那么就表明隔离芯片不存在问题,要是两者并不一样,那就意味着隔离芯片已经损坏了。
4.drv8701e驱动芯片检测
第三步就是检查芯片
容易损坏的是驱动芯片,检测驱动芯片时第一步要看,使能电路能不能稳定输出3.3V电压,进而让芯片解除休眠状态,要是led2不亮,那就说明使能电路有问题,要是亮了,还要进一步检测电压是不是3.3V。
要是能使电路不存在问题,那么可以进一步对drv8701e的GH1、GH2、GL1、GL2展开检测,实际上并没有必要借助示波器进行监测,使用电表就行,测量MOS管的栅极电压,要看是不是一个大致相同的数,应当近似于V乘以占空比的大小,要是四个输出端电压都不存在问题,符合H桥的转动原理,那么芯片没有问题。
5.mos管检测
最后进行mos的检测
按照B站的这段参考内容:借助数字万用表去测量MOS管的好坏,仅需三个流程以花一分钟,还请留意查看详尽的视频,其链接为https://www.bilibili.com/video/BV1Lr4y1K79T? vd_source=48e031772a10e1c6ed27e6883b0a030e 。
mos管时常会出现损坏情况,常见的损坏状况便是击穿问题啦,像平时所购买的大mos呢,实际上其击穿概率是比较低的,然而要是那种较为廉价的直插式mos,就极易发生击穿现象,解决这种情况的办法可以是把三个引脚利用锡丝连接在一起,让三者形成短路状态,如此一来就不会再出现击穿现象了。
要是电机处于不转动的状态,这有可能是芯片焊接方面存在问题,或者芯片已经出现损坏这种情况,也有或者是四个mos全面损坏的缘故,不过这种情形发生的概率并不高。
要是电机仅仅朝着一个方向进行转动,很大概率是mos管出现了损坏情况,当然了,也存在芯片内部运算出现错误的可能性。
要是处于同样的脉宽调制,电机进行正反旋转的速率不一样,通常来讲就是芯片焊接方面存在某些问题,或者已经遭受损坏了 。
尾言
要是仅仅只从软件方面去应用它的话,初步大致晓得最终的输出电压等于输入电压乘以脉宽调制的占空比暗网下载,并且方向信号要是为1的时候就是正向转动,而要是为0的时候则是反向转动,如此就行呢。
这儿的文本可不含有丝毫ai的成分,完全是手动敲写而成的哟,它是针对这半年以来所积累经验的汇总梳理,心里盼着一定能够对大伙起到协助作用呢,打从心底由衷地谢过曾给予我帮扶的学长啦。
 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论